Autonomous Placement of Ultrasound Probe for Spinal Surgeries
Last updated: 2/12 at 9:00P.M.
Summary
The goal of my project is automate the placement and control of ultrasound probes during minimally invasive spinal procedures with the goal of lowering cost to the patient and radiation exposure to the surgeon.
Students: Joshua Shubert
Mentor(s): Muyinatu Bell
Background, Specific Aims, and Significance
Due to advances in medicine, many procedures can now be performed in a minimally invasive manner. However for some Spinal procedures such as spinal fusions, kyphoplasty and vertebroplasty this means the use of X-ray imaging to guide the procedures.
The aim of this project is to simultaneously reduce radiation exposure to patient and surgeon and also lower the cost of the procedure by using inter-operative photoacoustic and ultrasound imaging.
Deliverables
Technical Approach
My project is split into 3 main parts:
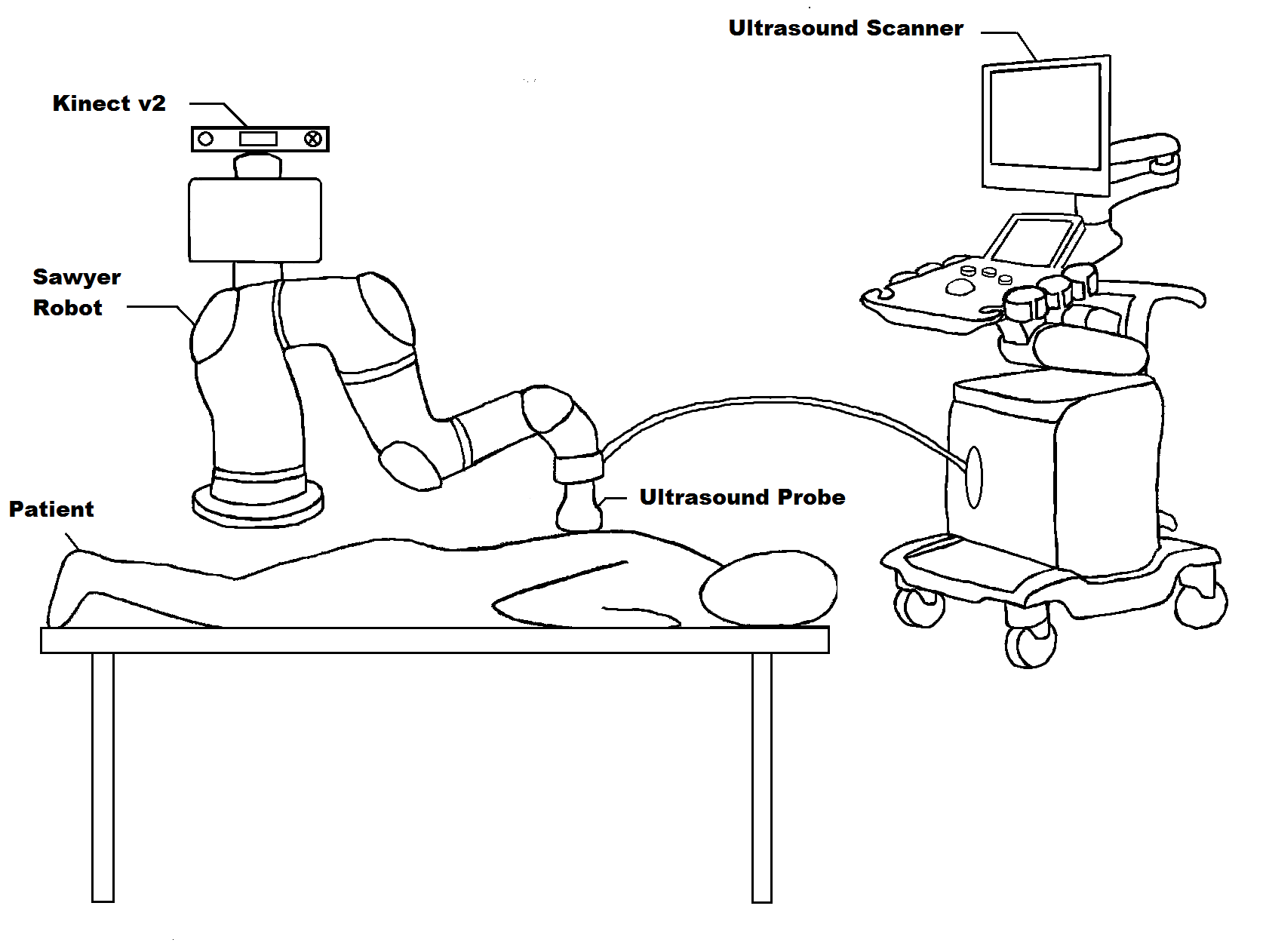
Preoperative Autonomous Placement of Ultrasound Probe onto Spinal Region
Calibration of Kinect v2 Intrinsic Parameters
Registration of Kinect v2 Coordinate Frame to Sawyer Robot base Coordinate Frame
Inverse Kinematics to Navigate Ultrasound Probe from an initial position to the patient's spine
Force Feedback is turned on once the Ultrasound Probe begins to descend toward the patient
“Off-Line” Exploration into the Viability of Photoacoustic Imaging from inside a needle inside a Vertebra
Spinal samples are obtained
Holes are drilled or poked into the spinal samples
Hollow bore needle is placed inside the spinal sample
Optical Fiber is then placed inside the needle
Ultrasound probe is placed so that it has good coupling to the spinal sample
Laser is turned on
If it is possible to get any PA signal, it will display on the Alpinion Scanner running a special PA beamforming script
The Laser Energy, Needle Placement, and Probe Placement are all tweaked to explore the viability of using PA imaging of the spine intraoperatively
Intraoperative Autonomous Tracking using Visual Servoing of a PA Imaged needle inside a Vertebra
A Needle Segmentation algorithm is developed to determine the pixel coordinates of the needle tip in the PA image in real time
Ultrasound Probe calibration is performed to be able to map the pixel coordinates of the needle tip into 3-D coordinates in the Robot Base Coordinate Frame
This can be used to keep the probe centered over the needle tip by moving the probe till the pixel difference between the needle tip and the center of the PA image is brought close to zero
Dependencies
Dependencies:
Sawyer Robot (Obtained)
Opotek Laser (Obtained)
Alpinion E-CUBE Ultrasound Scanner (Obtained)
Hollow Bore Needle (Obtained)
1mm Optical Fiber (Obtained)
Linear Array Ultrasound Probe (Obtained)
Kinect v2 (Obtained)
Spine Samples (Obtained)
IRB for Cadaver Study (Optional) (Not Met)
If approval for cadaver study not obtained, I will have to create a human shaped spinal phantom.
My plan for this is to remove the torso of a standard plastic mannequin and use it as a mold for making a phantom. Once the phantom is made (with a spine inside), I will reinsert it into the mannequin.
Milestones and Status
Milestone name: Calibrate and Register Kinect
Planned Date: Feb 20
Expected Date: Feb 27
Status: Completed
Milestone name: Human Outline Segmentation
Planned Date: Feb 27
Expected Date: Mar 13
Status: Completed
Milestone name: Explore PA in Spine
Planned Date: Feb 20
Expected Date: Mar 13
Status: Completed
Milestone name: Inverse Kinematics and Probe Placement
Planned Date: Mar 20
Expected Date: Mar 27
Status: Completed
Milestone name: Visual Servoing
Planned Date: Mar 27
Expected Date: Apr 24
Status: In Progress
Milestone name: Demonstrate Entire System
Planned Date: Apr 24
Expected Date: May 15
Status: In Progress
Reports and presentations
Project Plan
Project Background Reading
Project Checkpoint
Paper Seminar Presentations
Project Final Presentation
Project Bibliography
* here list references and reading material
Other Resources and Project Files
Here give list of other project files (e.g., source code) associated with the project. If these are online give a link to an appropriate external repository or to uploaded media files under this name space.

