Last updated: May 8, 2018
Summary
Our project is to track the osteotom tool that is used in Periacetabular Osteotomy (PAO) Surgery using RGBD and X-ray data. The osteotom tool is rigidly fixed on the bone fragment which is going to be cut and reoriented in the PAO surgery. By tracking the tool, the surgeon should be able to have a better knowledge of the position and orientation of the bone fragment which is mostly inside human body. With the help of our project, the surgeon is expected to be able to make the alignment more accurately, thus achieving a better clinical outcome of this surgery.
Students: Wenhao Gu and Billy Carrington
Mentors: Mathias Unberath, Robert Grupp, Prof. Armand, Porf. John Tis, Sing Chun Lee, and Javad Fotouhi
Background, Specific Aims, and Significance
* Background:
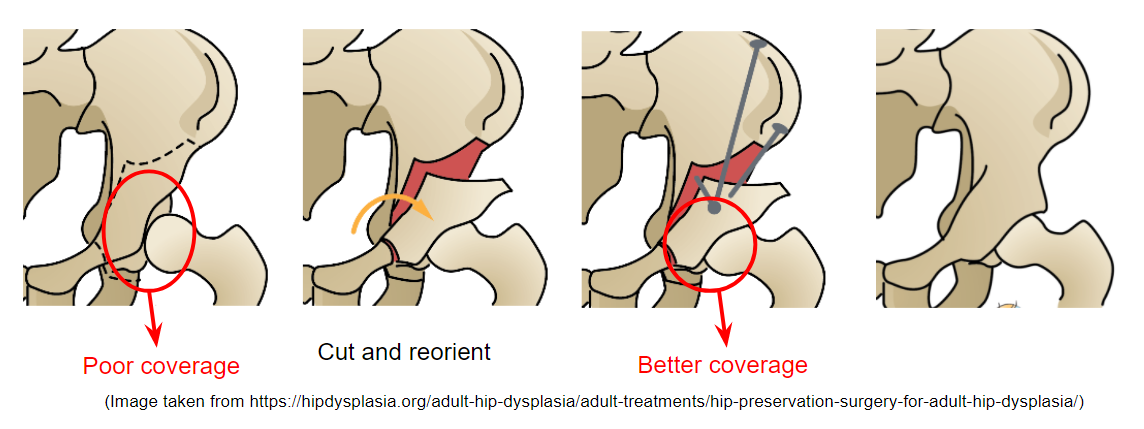
Periacetabular Osteotomy (PAO) is for patients suffering from developmental dysplasia of the hip (DDH)
Caused by reduced coverage of the femoral head
PAO surgery improves poor femoral coverage by reorienting the acetabulum and stabilizing the hip joint
However surgery is challenging due to reasons such as complex anatomy and slim margins of error.
Previous works have been done to help pre-operatively with surgeries like this.
* Specific Aims:
* Significance:
Documentation
Deliverables
Minimum: (4/6)
Working segmentation (e.g. background subtraction)
pose estimation (ICP)
visualization
Expected: (4/20)
improved segmentation
better pose estimation (globally optimal ICP)
visualize the cut plane
Maximum: (5/4)
Start collect data base upon the prototype
start investigating the planning approach
Technical Approach
Dependencies
Access to previous code (2D/3D registration, etc.)
Access to Intel RealSense SDK
Access to PCL (Point Cloud Library)
Access to RGBD camera
Access to the C-arm x-ray
Access to the CAD model and the True model
Milestones and Status
Milestone name: Become familiar with pre-existing works on the topic:
Milestone name: Complete Minimum deliverable/ start expected/deliverables
Milestone name: Expand upon our previous segmentation and pose estimation methods
Planned Date: April 16th
Expected Date:April 20th
Status: in progress
Milestone name: Complete expected deliverables/start maximum deliverables
Planned Date: April 16th
Expected Date:April 20th
Status: in progress
Schedule
Reports and presentations
Project Bibliography
* here list references and reading material
-
-
Murphy, R. J., Armiger, R. S., Lepistö, J., & Armand, M. (2016). Clinical evaluation of a biomechanical guidance system for periacetabular osteotomy. Journal of orthopaedic surgery and research, 11(1), 36.
Murphy, R. J., Armiger, R. S., Lepistö, J., Mears, S. C., Taylor, R. H., & Armand, M. (2015). Development of a biomechanical guidance system for periacetabular osteotomy. International journal of computer assisted radiology and surgery, 10(4), 497-508.
Murphy, R. J., Otake, Y., Lepistö, J., & Armand, M. (2013). COMPUTER-ASSISTED X-RAY IMAGE-BASED NAVIGATION OF PERIACETABULAR OSTEOTOMY WITH FIDUCIAL BASED 3D ACETABULAR FRAGMENT TRACKING. Bone Joint J, 95(SUPP 28), 84-84.
Otake, Y., Armand, M., Armiger, R. S., Kutzer, M. D., Basafa, E., Kazanzides, P., & Taylor, R. H. (2012). Intraoperative Image-based Multiview 2D/3D Registration for Image-Guided Orthopaedic Surgery: Incorporation of Fiducial-Based C-Arm Tracking and GPU-Acceleration. IEEE Transactions on Medical Imaging, 31(4), 948–962.
Fotouhi, J, et al. “Pose-aware C-arm for automatic re-initialization of interventional 2D/3D image registration.” International Journal of Computer Assisted Radiology & Surgery 12.7(2017):1221-1230.
Other Resources and Project Files
Here give list of other project files (e.g., source code) associated with the project. If these are online give a link to an appropriate external repository or to uploaded media files under this name space.2018-11




