Table of Contents
iPASS: Photoacoustic Catheter Tracking
Last updated: 5/6/16 8:00AM
Summary
This project proposes new way of tracking technology by integration of the laser technology with the computer vision, and also piezoelectric effect. The goal of this project is to track a catheter using a stereo camera and applying laser spots on the patient surface, which can be seen by the stereo camera and generate a photoacoustic (PA) signal observed by the piezoelectric element. Preliminary results show reasonable repeatability of element localization.
- Students: Yuttana (Big) Itsarachaiyot
- Mentor(s): Alexis Cheng, Younsu Kim, Emad Boctor, Russell Taylor
You may want to include a picture or two here.
Background, Specific Aims, and Significance
Photoacoustics is an acoustic wave generation by an absorption of light. The history of photoacoustic effect discovery starts from 1880 when Alexander Graham Bell observed it. The photoacoustic effect is broadly applied for using in various fields, especially medical field for spectroscopy. While the piezoelectric element is a device using the piezoelectric effect to measure changes in pressure, temperature or force by converting them to the electrical charge. Piezoelectric effect is used in many applications, such as detection of sound and generation of electronic frequency. When comparing to other guidance systems, the benefit of this project is that this method does not require any physical markers in order to create a coordinate transformation, also it does not need to have calibration processes because we can directly compute the coordinate transformation from the collected data. The significance of this project is to enable an innovation to track the tool in interventional photoacoustic system with no additional trackable markers and/or calibration processes.

Deliverables
- Minimum: (Expected by April 2, 2016)
- Refined circuit board for collecting data (Achieved)
- System configuration setup (Achieved)
- Phantom and Ex vivo data for sequential projection (Achieved)
In vivo experimental protocol- Analysis and validation of accuracy and precision measures of experimental data (Achieved)
- Expected: (Expected by April 23, 2016)
- Optimization of the number and pattern of spots (Achieved)
Concurrent projection of multiple laser points- Repeat the experiment with multiple points (Achieved)
- Maximum: (Expected by May 5, 2016)
- Real-time tracking system
In vivo experiment feasibility study
Technical Approach
2.1 Stereo camera point segmentation The goal of this approach is to locate the laser points in stereo camera images. Since we are dealing with multiple image frames, composed of either images with or without the laser point, the efficient segmentation method for those points is needed. Some characteristics of images are determined to be used as parameters of this segmentation method, such as intensity thresholds based on histogram of intensities, pixel size threshold, and shape filter.
2.2 System overview for PA signal acquisition The reason for this approach is to acquire the PA signal. We use the DAQ system to collect the signal. We not only use a filter to remove some unwanted feature noises from a signal before being sampled in the DAQ, but also apply the impedance matching design to improve the signal-to-noise ratio.

2.3 Trilateration method The reason for this approach is to acquire the location of piezoelectric element point or the location of catheter tip in this project. Trilateration is the method of calculating locations of points by measurement of distances, and applying the theory of geometry of circles and spheres.

2.4 Validation The reason for validation is to show that this system succeeds the project goals. We will use two methods to validate the system. One of them is “repeatability”: the result of calculation with different subsets of PA spots data should give the same location of catheter tip. Another method is “relative distance”: the results of calculation of at least two different set-up tip locations will be compared with known distance of those points. }
Dependencies

Milestones and Status
- Milestone name: Phantom Acquisition
- Planned Date: February 27, 2016
- Expected Date: February 27, 2016
- Status: Complete
- Milestone name: Circuit Board Refinement
- Planned Date: February 27, 2016
- Expected Date: February 27, 2016
- Status: Complete
Milestone name: In vivo Experimental ProtocolPlanned Date: February 27, 2016Expected Date: February 27, 2016- Status: Deleted after discussion with mentors
- Milestone name: Synthetic Phantom/Ex vivo Experiment
- Planned Date: March 12, 2016
- Expected Date: March 26, 2016
- Status: Complete March 26, 2016. Delayed due to the need of more experiments
- Milestone name: Analysis and Validation of Experimental Data
- Planned Date: March 19, 2016
- Expected Date: April 2, 2016
- Status: Complete
Milestone name: Concurrent Projection Method DevelopmentPlanned Date: April 2, 2016Expected Date: April 2, 2016- Status: Deleted after discussion with mentors
- Milestone name: Synthetic Phantom/Ex vivo experiment for optimizing the number and pattern of spots
- Planned Date: April 16, 2016
- Expected Date: April 16, 2016
- Status: Complete
- Milestone name: Analysis and Validation of Experimental Data
- Planned Date: April 23, 2016
- Expected Date: May 5, 2016
- Status: Complete
- Milestone name: Real-time Tracking System
- Planned Date: May 5, 2016
- Expected Date: -
- Status: -
Milestone name: In vivo Experiment Feasibility StudyPlanned Date: May 5, 2016Expected Date: May 5, 2016- Status: Deleted after discussion with mentors
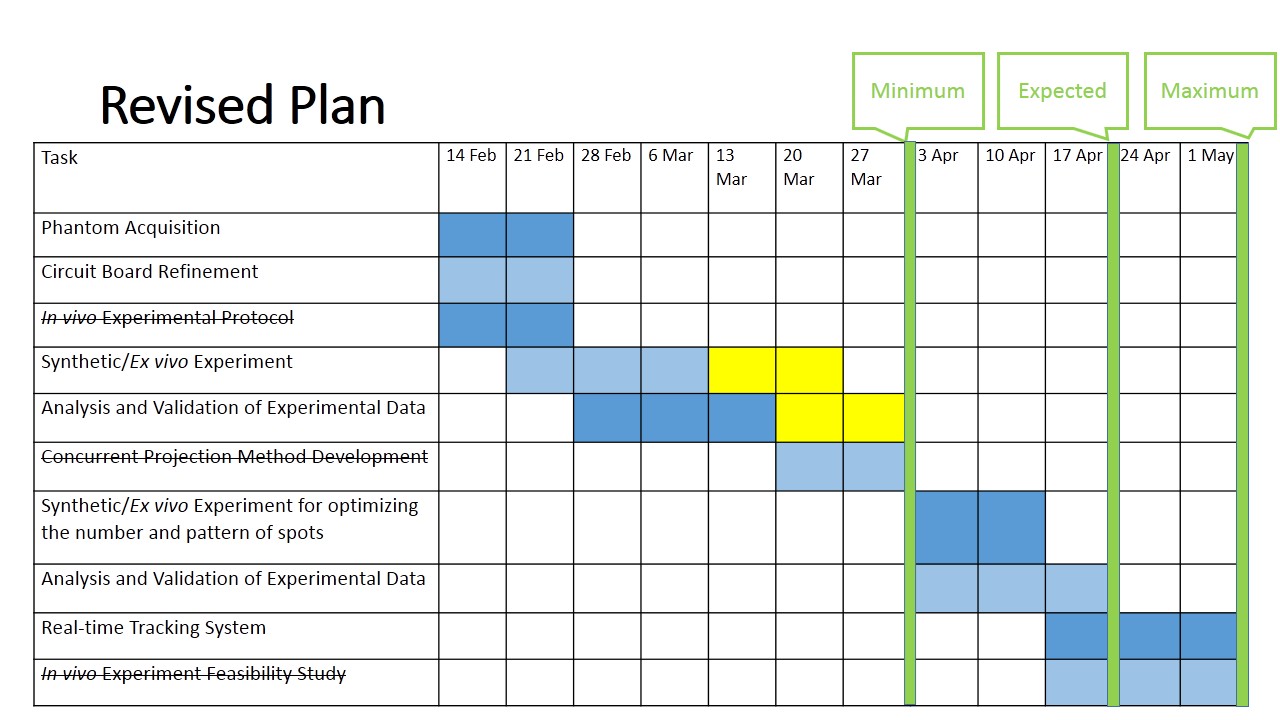
<Click on image to enlarge>
Reports and presentations
- Project Plan
- Project Background Reading
- See Bibliography below for links.
- Project Checkpoint
- Paper Seminar Presentations
- Project Final Presentation
- Project Final Report
- links to any appendices or other material
Project Bibliography
- Xiaoyu Guo et al. “Active Ultrasound Pattern Injection System (AUSPIS) for Interventional Tool Guidance”. PLoS ONE 9(10) 2014
- Alexis Cheng et al. “Catheter Tracking in an Interventional Photoacoustic Surgical System”. Submitted to CLEO 2016
- A.Wiles, D. Thompson, and D. Frantz, “Accuracy assessment and interpretation for optical tracking systems,” Proc. SPIE 5367, 421–432 (2004)
- Alexis Cheng et al. “Direct three-dimensional ultrasound-to-video registration using photoacoustic markers”. Journal of Biomedical Optics 18(6), 066013 (June 2013)
- M. Xu and L. Wang, “Photoacoustic imaging in biomedicine,” Rev. Sci. Instrum. 77, 041101 (2006)
- Alexis Cheng et al. “Direct ultrasound to video registration using photoacoustic markers from a single image pose”. SPIE 2015