Contact Us
CiiS Lab
Johns Hopkins University
112 Hackerman Hall
3400 N. Charles Street
Baltimore, MD 21218
Directions
Lab Director
Russell Taylor
127 Hackerman Hall
rht@jhu.edu

Last updated: 04/23/2021 06:00 PM
This project aims to build a robotic system for (semi)automatic calibration of flexible needles with FBG-based shape-sensing capabilities. FBG-embedded needles require precise and consistent calibration which can take several hours and is prone to human errors. Robot-assisted needle calibration would optimize needle construction and improve shape-sensing accuracy.
This project is motivated by the current prostate biopsy and brachytherapy procedures, in which a stiff needle is inserted manually into the target region of the prostate tissue with ultrasound guidance. This approach has its issues because even though ultrasound probe is cheap and easily accessible, it doesn't perform well in visualizing cancerous regions or the radioactive seeds to be implanted. Also, the stiff needle approach is associated with poor accuracy and repeatability of the procedure, as the prostate often rotates and deforms during the procedure, causing the displacement of the target region. Thus, an updated approach was introduced, in which a flexible needle was inserted with robotic assistance using real-time MRI guidance.
A lot of work has been done on the updated approach, including choosing the bevel-tip needle as the needle to work with, and integrating FBG sensors to monitor the curvature of the needle. Also, a lot of progress has been made in modeling the needle and using algorithms to predict the trajectory of each needle. As each needle is unique, the needles are also calibrated manually before applying the models and algorithms.
The current problem rises with the calibration process of the needle. As the needles are very sensitive, manual needle calibration is very time-consuming and prone to human error. Currently it takes about several hours to calibrate a single needle because the needle has to be handled slowly and carefully. Thus the goal of this project is to set up an automatic needle calibration process using robotic assistance.
This project aims to develop an automatic needle calibration process that is both precise and efficient. Other objectives include having the calibration platform compatible with multiple types of needles and various calibration needs.
Having an automatic needle calibration process will save up time and human resources for other researches involving flexible FBG-sensorized needles. It will also be one of the vital components in validating research results involving these needles.
The technical approach is divided into three sections: development of the calibration platform, generation of an algorithm for the robotic arm, and processing of input data.
The entire calibration cycle consists of two calibration processes. The first process is characterization, which aims to ensure that the needle is working properly. It is done by having the needle bent downwards on a platform set up on a precision scale and plotting the FBG sensor readings with respect to the bending force measured from the scale. The manual version of this calibration process is shown below.
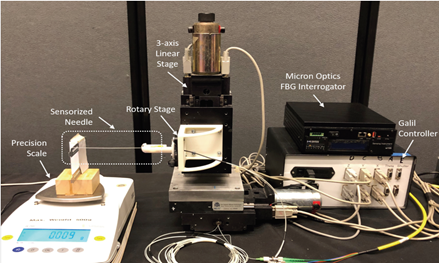
For this process, the robotic arm and the precision scale need to be fixed on the platform at known locations. The fixation mechanism for the precision scale also needs to be removable as the scale is shared with other projects.
After discussions and several revolutions, the platform is designed as shown below.
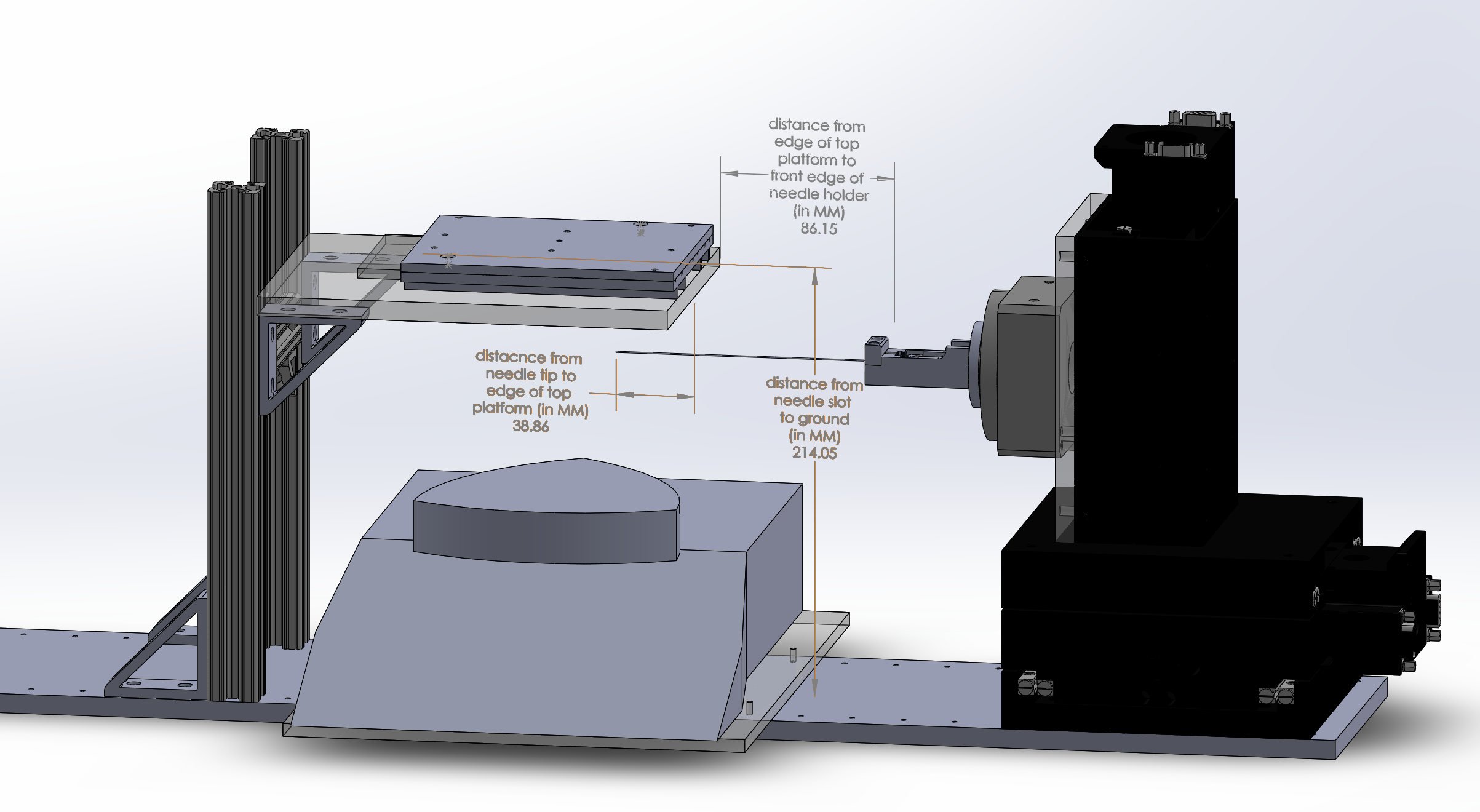
The final built platform is shown below. Top view: 0505_06.jpg Side view: 0505_07.jpg
The folder containing all 3D models of the platform design is accessible through this link.
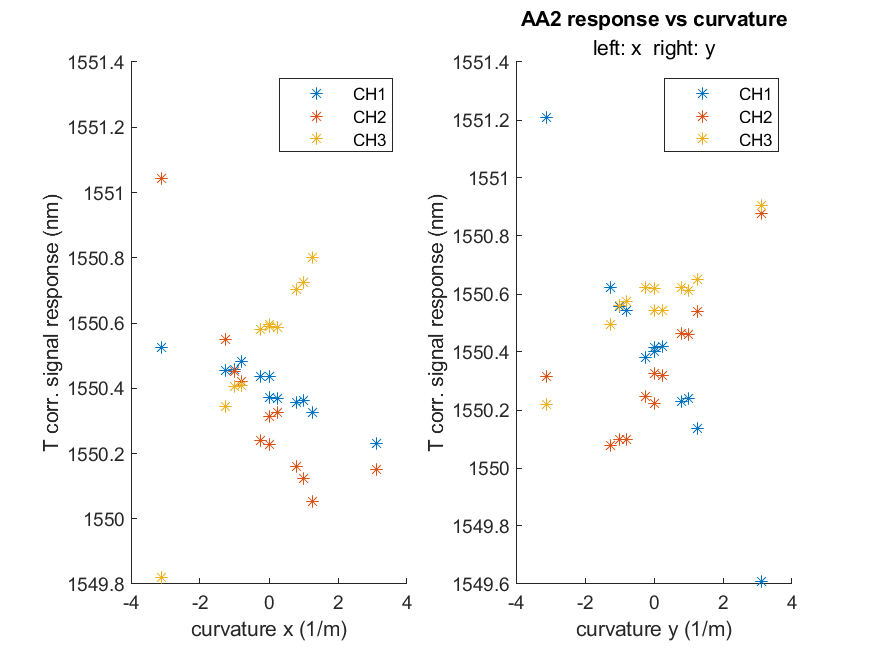
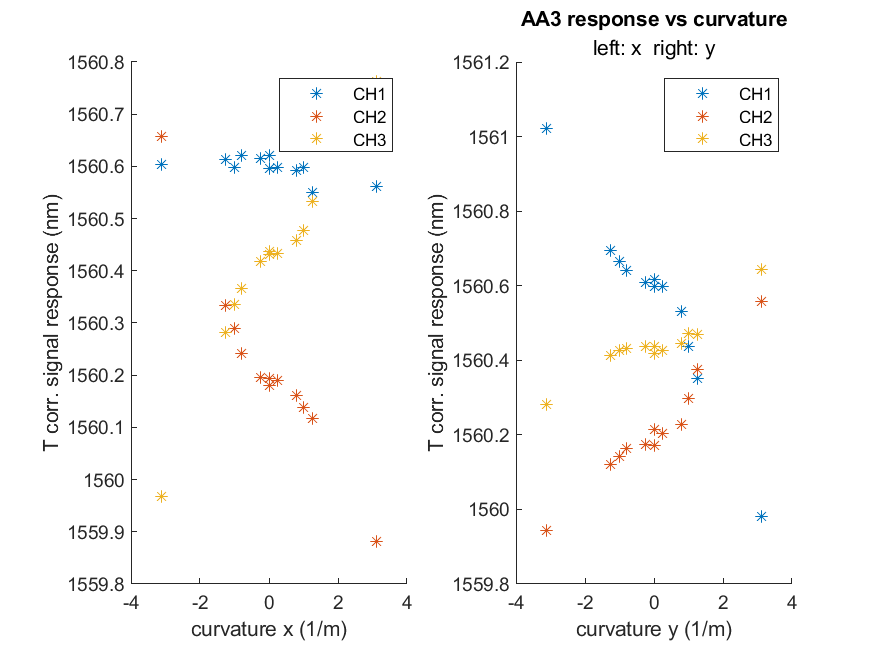
The second calibration process aims to calibrate the readings of the FBG sensor inside the needle with the actual curvature of the needle. In order to do that, the needle is inserted repeatedly into a calibration jig with multiple slots of constant curvature. Below is the manual version of this calibration process.
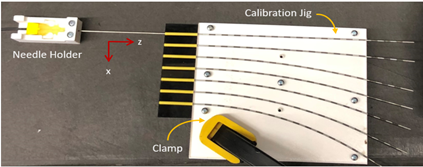
For this process, the calibration jig also needs to be fixed at a precise location on the platform. It is also desired for the calibration jig to be swappable so the platform is applicable to more needles and various calibration needs.
The entire calibration process involves bending the needle on the precision scale and repetitive insertion of the needle into the calibration jig. Thus the workflow of the calibration cycle is designed as shown below. The operations in red are performed automatically, the operations in yellow are performed automatically in an ideal setting but can be controlled manually, and the operations in green are performed manually.
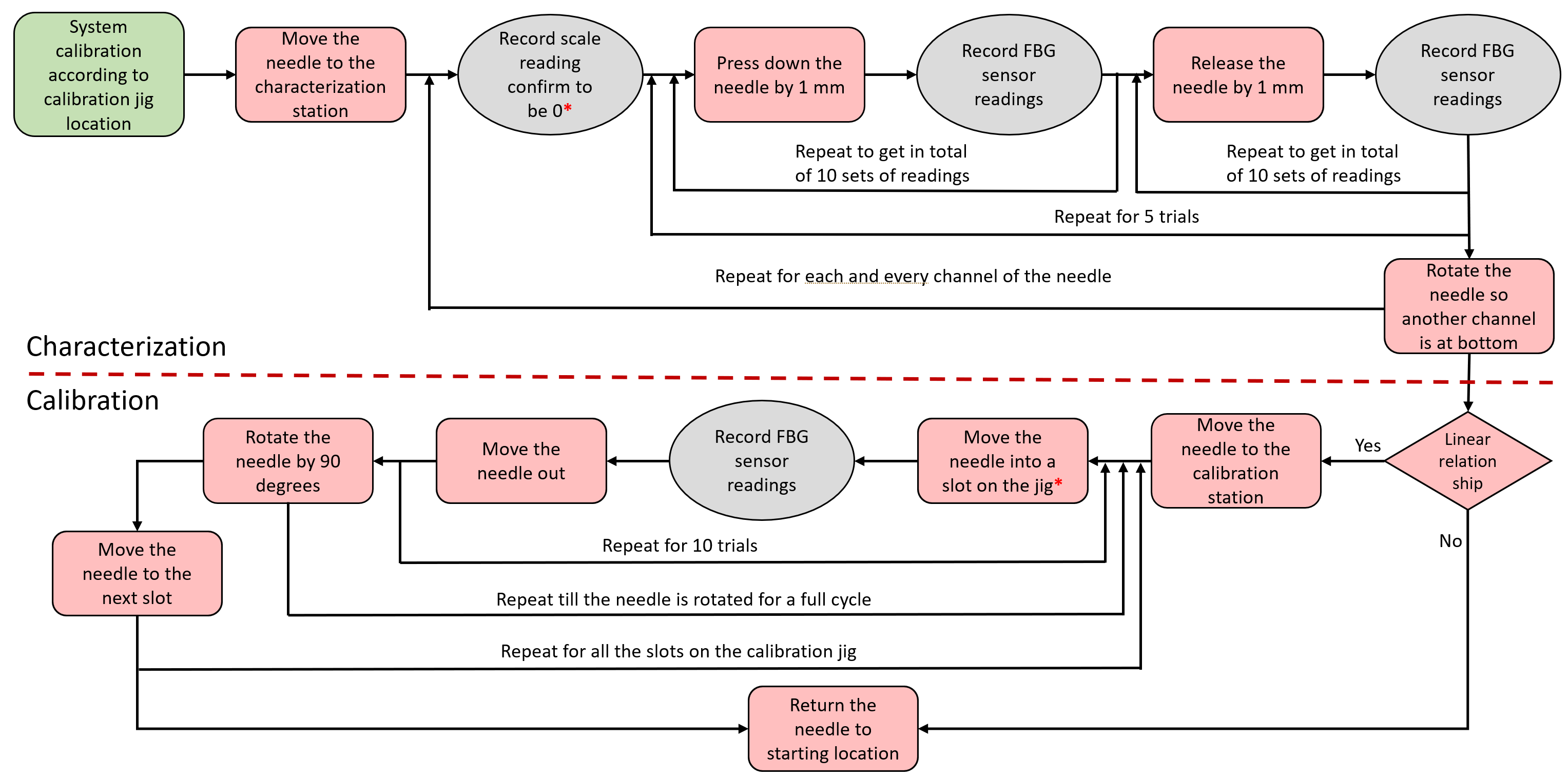
During the calibration process, there are three data sources: the FBG sensors in the needle, the precision scale and the curvature parameters of the calibration jig. The data from the FBG sensors is acquired through a data acquisition system, the data from the scale is acquired through a direct serial connection to the computer, and the data from the jig is entered manually before the calibration process. Thus, a Matlab function is needed to integrate all three data inputs and calculate the calibration matrices for the needle according to the data.
The folder containing algorithms for the project is accessible through this link.
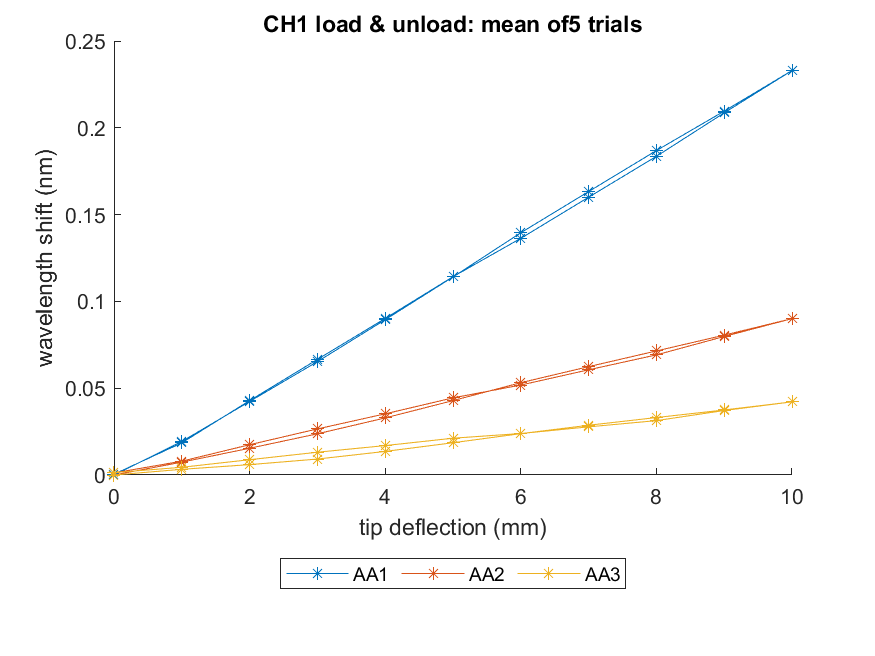
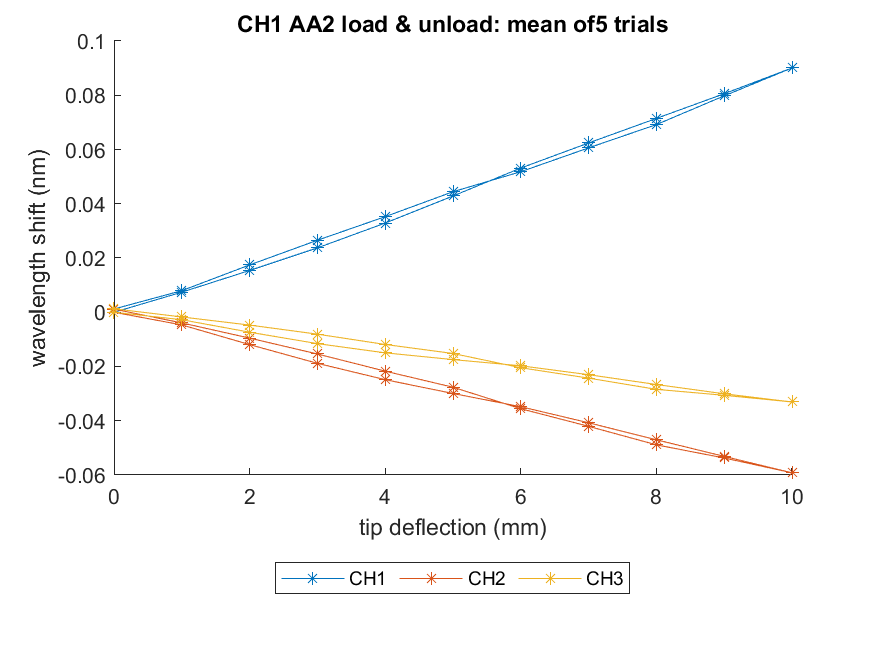
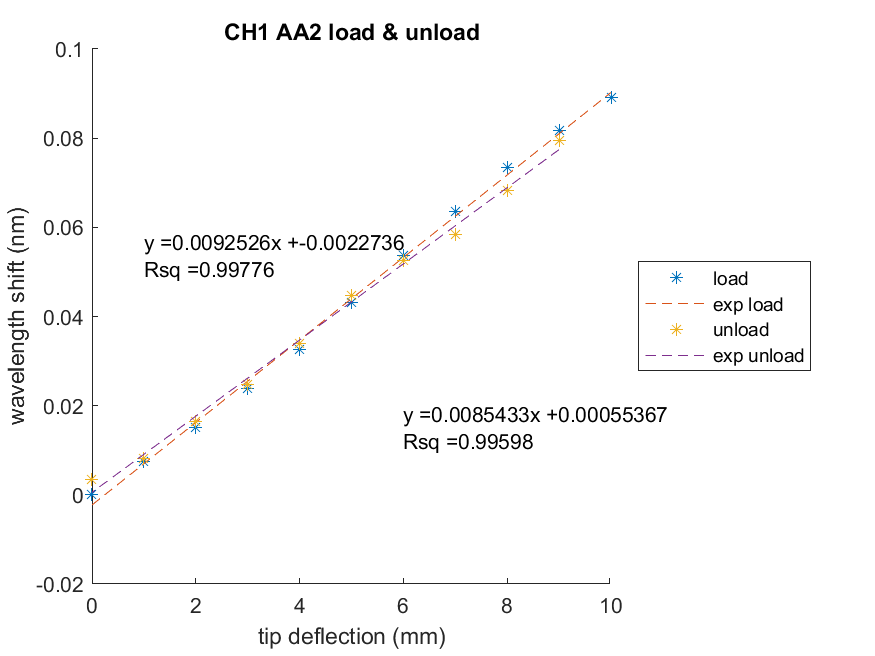
The calibration system is successfully built and tested. It is able to produce both characterization and calibration results of a needle as well as the final calibration matrix for that specific needle. Sample plots of the characterization and calibration results are shown below.
Characterization:
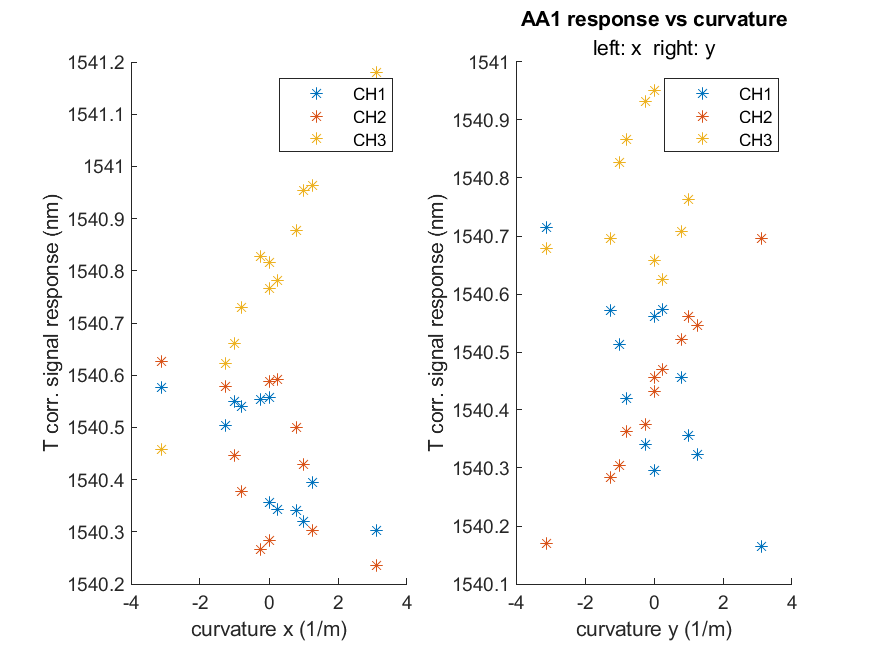
Calibration:
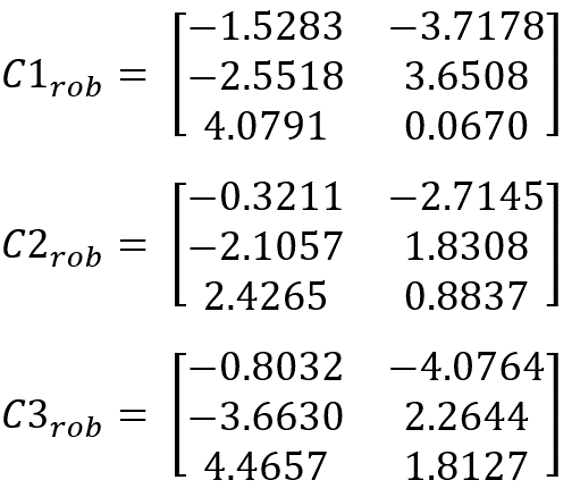
The set of calibration matrices obtained for the sample needle is:
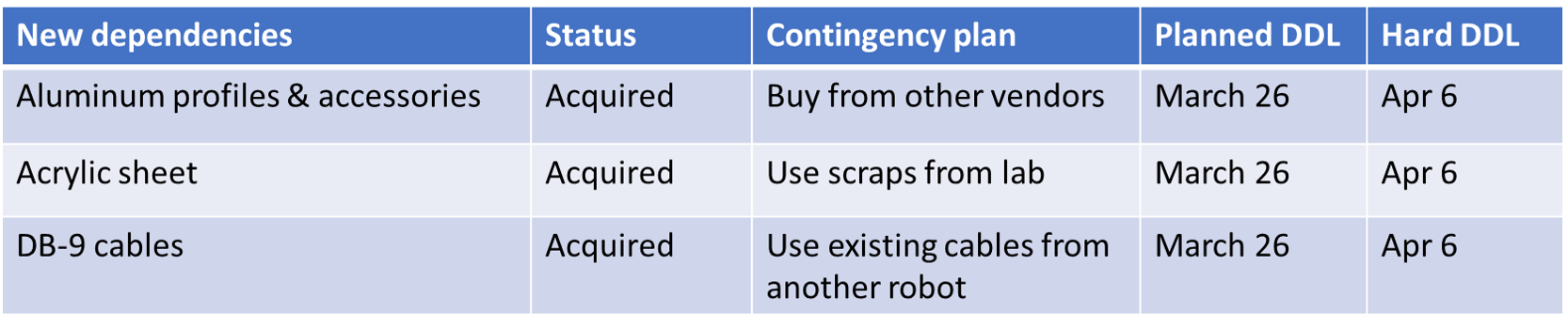
The dependencies of the project are organized in the table below. Most dependencies are already resolved, and the contingency plan will be executed for any dependency that is not resolved by the planned deadline.
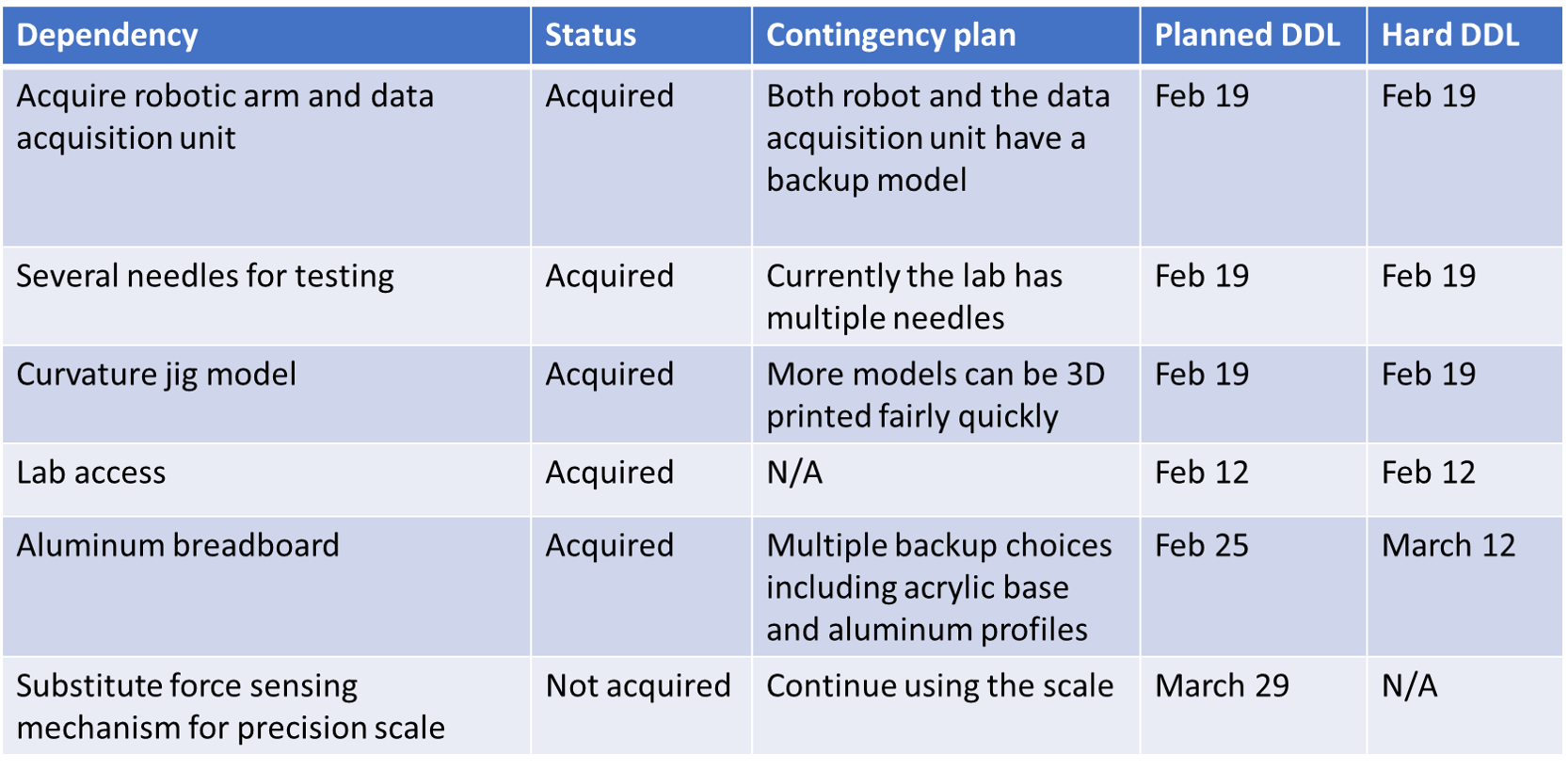
Following the change of design of the calibration platform, some new dependencies are added and are shown below.
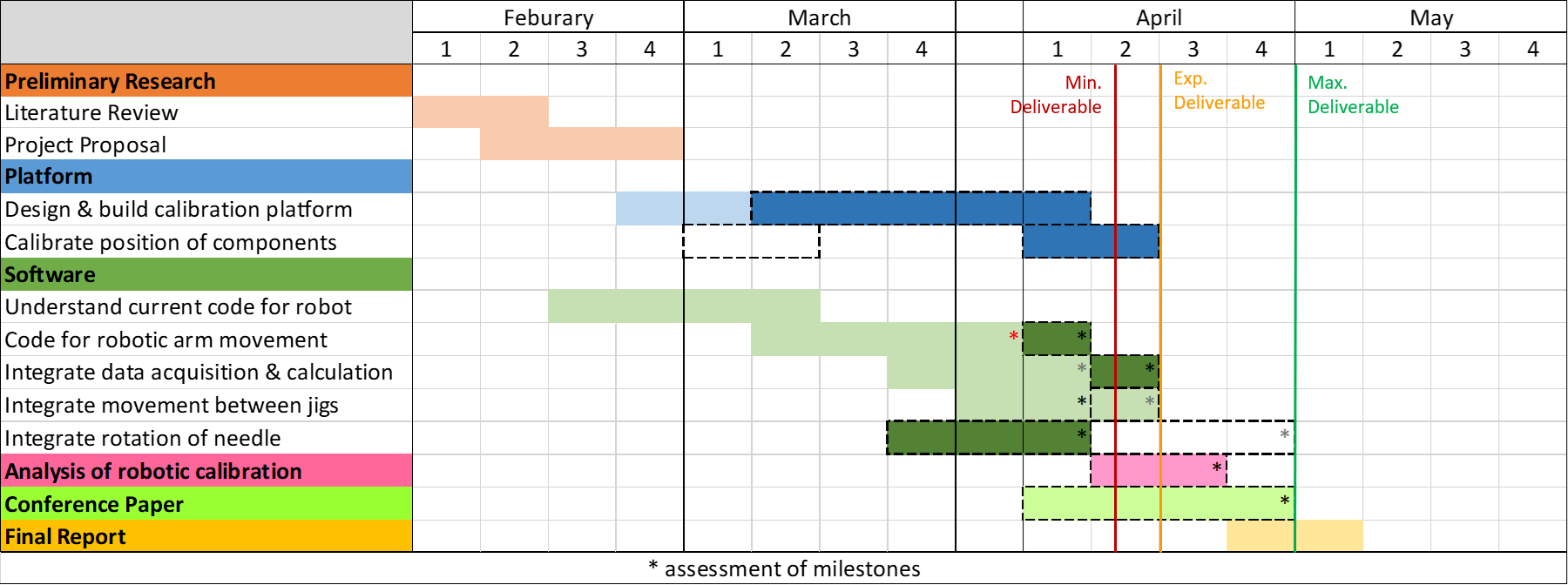
The proposed timeline of this project is shown in the figure below and will be updated as the project progresses.
Zhang, L., Li, C., Zhang, X., Liu, G., Liu, Y., Zhao, J., … & Fan, Y. (2019, December). A New Method For Fiber Bragg Grating Based Needle Shape Sensing Calibration. In 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 1953-1958). IEEE.
Seifabadi, R., Iordachita, I., & Fichtinger, G. (2012, June). Design of a teleoperated needle steering system for MRI-guided prostate interventions. In 2012 4th IEEE Ras & EmbsInternational Conference on Biomedical Robotics And Biomechatronics(Biorob) (pp. 793-798). IEEE.
Sankaran, N. K., Chembrammel, P., & Kesavadas, T. (2020). Force calibration for an endovascular robotic system with proximal force measurement. The International Journal of Medical Robotics and Computer Assisted Surgery, 16(2), e2045.
Seifabadi, R., Gomez, E. E., Aalamifar, F., Fichtinger, G., & Iordachita, I. (2013, November). Real-time tracking of a bevel-tip needle with varying insertion depth: Toward teleoperated MRI-guided needle steering. In 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 469-476). IEEE.
Kim, J. S., Guo, J., Chatrasingh, M., Kim, S., & Iordachita, I. (2017, September). Shape determination during needle insertion with curvature measurements. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 201-208). IEEE.
Lezcano, D. A., Iordachita, I. I., & Kim, J. S. (2020, October). Trajectory Generation of FBG-SensorizedNeedles for Insertions into Multi-Layer Tissue. In 2020 IEEE Sensors (pp. 1-4). IEEE.
Kim, J. S., Chatrasingh, M., Kim, S., Suthakorn, J., & Iordachita, I. I. (2017, December). Fiber Bragg Grating based needle shape sensing for needle steering system: Evaluation in inhomogeneous tissue. In 2017 IEEE SENSORS (pp. 1-3). IEEE.
Henken, K. R., Dankelman, J., van den Dobbelsteen, J. J., Cheng, L. K., & van der Heiden, M. S. (2013). Error analysis of FBG-based shape sensors for medical needle tracking. IEEE/ASME Transactions on mechatronics, 19(5), 1523-1531.
Galloway, K. C., Chen, Y., Templeton, E., Rife, B., Godage, I. S., & Barth, E. J. (2019). Fiber optic shape sensing for soft robotics. Soft robotics, 6(5), 671-684.
Chen, X., Yi, X., Qian, J., Zhang, Y., Shen, L., & Wei, Y. (2020). Updated shape sensing algorithm for space curves with FBG sensors. Optics and Lasers in Engineering, 129, 106057.
Here give list of other project files (e.g., source code) associated with the project. If these are online give a link to an appropriate external repository or to uploaded media files under this name space (2021-06).
{kind=link}
{kind=link}