Surgical Skill Evaluation in Endoscopic Sinus Surgery
Last updated: May 10 and 12 PM
Summary
This project aims at developing a mathematical model on surgical skill evaluation in endonasal surgeries to identify and model the motion of critical movements to determine when these movements can lead to surgical complications.
Background, Specific Aims, and Significance
Background:
Endonasal skull base and sinus surgeries requires to operate in a region that is in vicinity of many critical regions like carotid artery and optic nerve.
Thus this surgery involves a lot of critical movements on the surgeon's part which if not performed correctly can cause very serious injuries to the patient.
Specific Aims:
Mathematically model the critical movements in the surgery
Given a series of movements, determine whether this may lead to surgical complications or not.
Significance:
This model will help train the surgeon better especially with the critical movements.
With the help of this model, the surgeons will be able to determine, during the surgical procedure when the surgery is going well and when it is not and can take necessary precautions beforehand.
Deliverables
Technical Approach
Figure 2 shows the summary of the technical approach to be followed in this project.
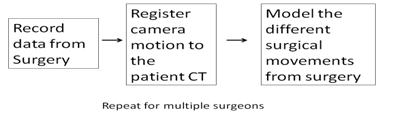
Figure 2. Summary of the technical approach for the project
RECORDING DATA FROM SURGERY
This step requires to write a software to record tracker data and the video from endoscope during an endonasal surgery. The system currently employed in the Operating Room is a tracker based navigation system is shown in Figure 3. The software will have a calibration mode and Surgery mode. Calibration mode will be enabled during camera calibration and surgery mode will be enabled during surgical procedure. The software will have an easy to use GUI to start/stop recording, set mode and will also display the progress of recording.
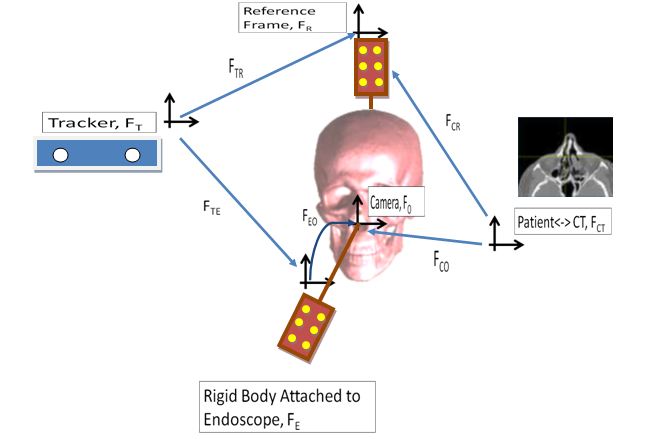
Figure 3: Diagrammatic representation of the system currently employed in the operating room
CAMERA MOTION - CT REGISTRATION (Solving for FCO, Figure 3)
This procedure involves three steps:
1. The preprocessing before registration calculation
2. Registration calculation.
3. Optimize the registration over all the frames.
The Pre Processing step:
The pre processing step involves writing a software to do the following tasks:
Check the synchronization between video sequence and tracker data and remove any phase difference between them.
We need to first calculate FTR, FTE, FCR, FEO in order to be able to calculate FCO
FTR, TTE: These will be calculated by using the tracking data for the markers attached to the reference frame and the rigid body attached to the endoscope.
FCR: This will be calculated using CT fiducials attached to the reference frame. An intrinsic transformation will need to be calculated between the Tracker markers and the CT fiducials to enable transforming data in tracker co ordinate to CT co ordinates.
FEO :: Solve AX = XB in the figure below.

Registration calculation step
The next task is to register the camera motion to the CT (Calculating FCO). For this purpose we will use the data from the navigation system and the endoscopic video from the surgery to register the motion of the endoscope tip to the CT.
The complete registration procedure is illustrated in the figure below:
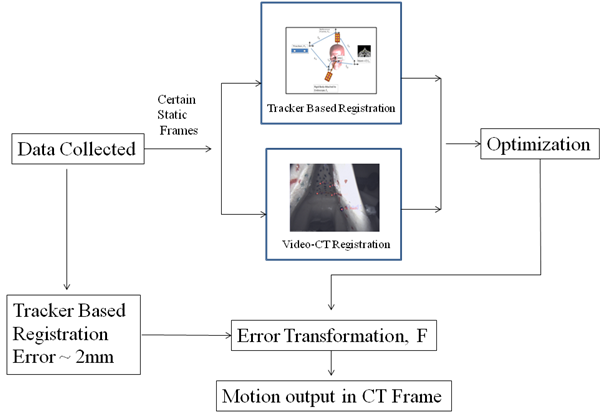
Tracker Based Registration:
Video CT Registration:
Optimize Camera-CT Registration
The result from tracker based registration produces a registration error of 2 mm while image based registration produces sub millimeter error, but is recorded only for a certain number of static frames. The aim of this step is to use the result from image based registration to optimize tracker based registration over all the frames. As shown in the figure 4 we use calibration to calibrate tracker based registration to produce minimum error.
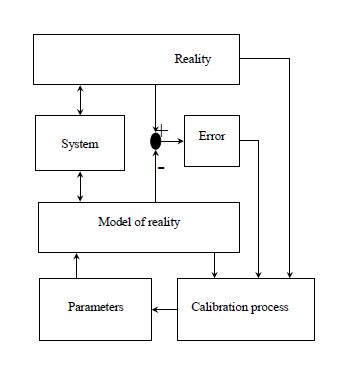
Figure 4: Diagrammatic representation of optimization procedure.
Figure cited from CIS 1 lecture slide on calibration
SURGICAL SKILL MODELING
Manually segment the video frames into different movements (approach, handling the tool, etc.) for an expert conducted and a novice conducted surgery.
Te feature vector that would characterize the task would be the location of the endoscope in the CT frame through the task
Transform the coordinate frame from CT to an w.r.t. an anatomical landmark
Train a Hidden Markov model for each of these tasks separately for an expert conducted surgery.
Test the model for a dataset with unknown skill level.
Results and Outcomes
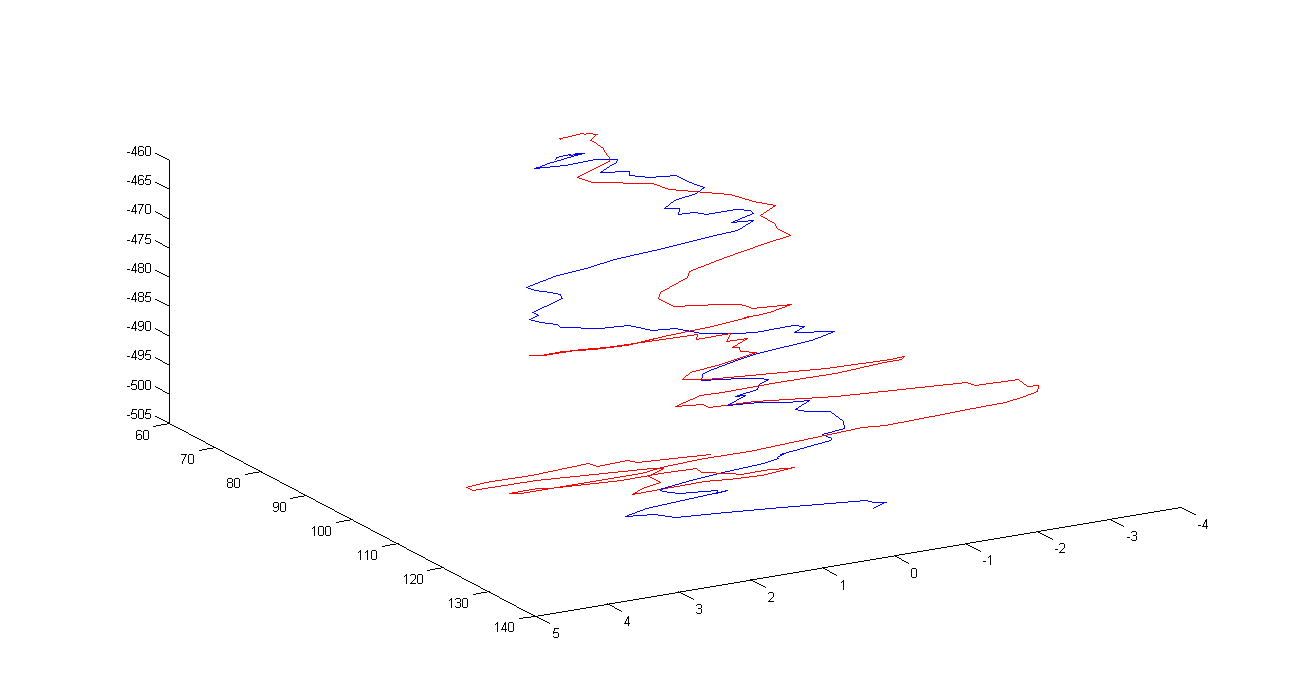
The complete procedure was tested on a recording conducted on a phantom
Figure below shows the result from 2D-3D registration. The image on the left shows the camera pose before registration and the image on the right shows the camera pose after registration. The blue points indicate the position of the landmarks as segmented from CT and the red points indicate the position of the landmarks in the image coordinates
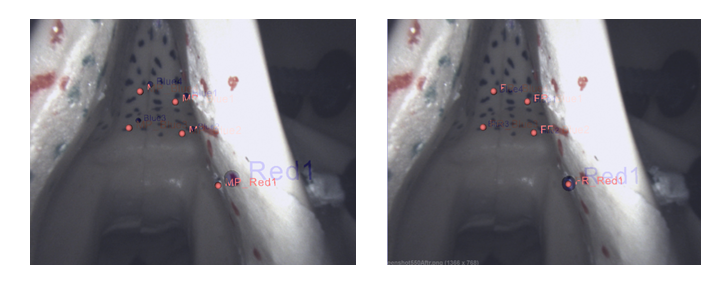
error for 5 different static frames was as follows:
Initial Error in each coordinate direction (in mm) =
2.1816 2.1214 1.1958
Total Error: 3.2695 mm
Final Error in each coordinate direction (in mm) =
0.9283 1.2236 0.9067
Total Error: 1.7835 mm
Dependencies
CISST Library: Resolved
Medtronic Stealthlink libraries: Resolved
System with capture card to record data from OR: Resolved
Training for Access to OR: Resolved
Required system (Stealthlink Tracker, endoscope, Foot pedal) in the OR: Resolved, Mentors are working on to get this system into the OR
Software for Camera Calibration: Resolved, Part of CISST library.
Get access to the OR for recording a surgery: Pending, Dependent on when the surgeon has a surgery and whether the OR will be available for recording then.
Software for Surgical Modeling: Pending, Available in the lab. Talk to mentors for access.
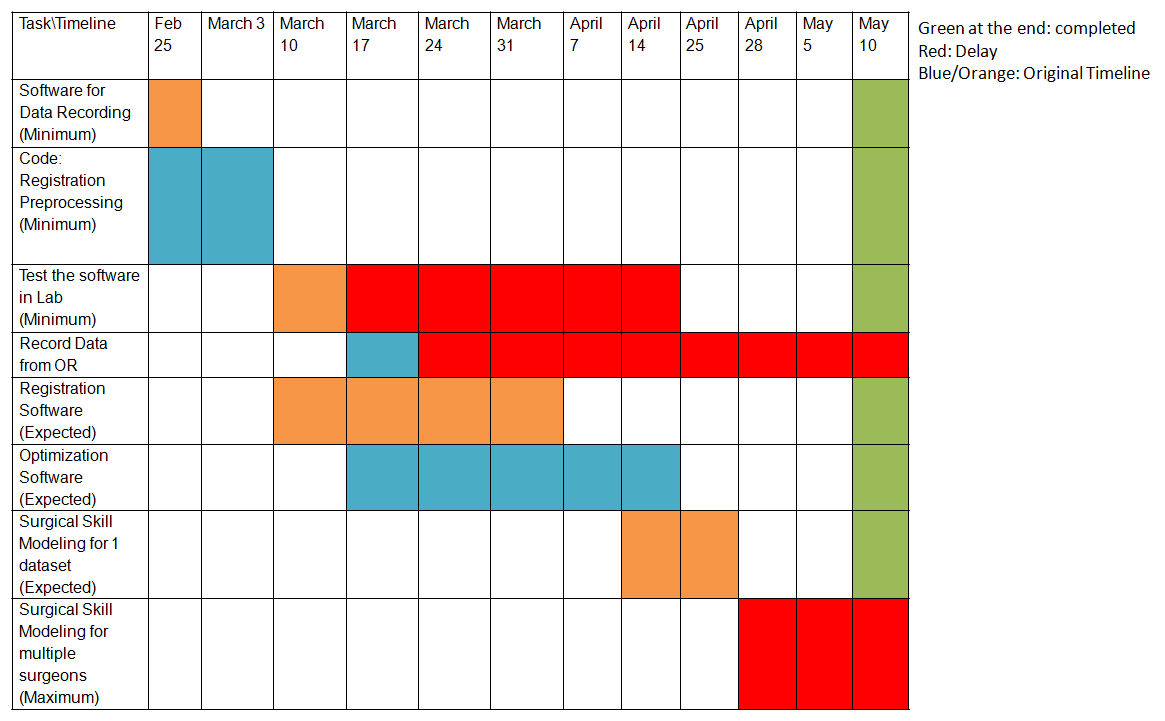
Milestones and Status
Milestone name: Recording Software
Planned Date: March 3
Expected Date: March 7
Status: Completed
Milestone name: Test the Recording Software in the Lab
Milestone name: Install the software in the OR for recording a surgery during the week
Milestone name: Registration Software
Planned Date: April 14
Expected Date: April 14
Status: Completed
Milestone name: Surgical Skill Modeling
Reports and presentations
Project Plan
Project Background Reading
Project Checkpoint
Paper Seminar Presentations
Project Final Presentation
Project Final Report
Project Bibliography
D. J. Mirota, H. Wang, R. H. Taylor, M. Ishii, G. L. Gallia, and G. D. Hager, “A system for video-based navigation for endoscopic endonasal skull base surgery,” medical imaging, IEEE transactions on, ISS. 99, 2011.
Chien-ping Lu, Gregory D. Hager and Eric Mjolsness, ‘fast and globally convergent pose estimation from video images’, IEEE transactions on pattern analysis and machine intelligence, 2000
Carol E. Reiley and Gregory D. Hager, 'Decomposition of Robotic Surgical Tasks: An analysis of Subtasks and Their Correlation to Skill.
D. J. Mirota, A. Uneri, S. Schafer, S. Nithiananthan, D. D. Reh, G. L. Gallia, R. H. Taylor, G. D. Hager, and J. H. Siewerdsen, “High-accuracy 3D image-based registration of endoscopic video to C-arm cone-beam CT for image-guided skull base surgery,” in Medical Imaging 2011: Visualization, Image-Guided Procedures, and Modeling, 2011, p. 79640j-1.
R.Y. Tsai, An Efficient and Accurate Camera Calibration Technique for 3D Machine Vision. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Miami Beach, FL, pp. 364-374, 1986
Other Resources and Project Files








