Objective Surgical Skill Assessment of Computer-Aided Hysterectomy Procedures
Last updated: Sunday, May 5, 2019 3:57 PM
Summary
This is a project that strives to evaluate the skill level of the surgeon carrying out a hysterectomy procedure using the da Vinci Surgical System in the OR of Johns Hopkins Hospital. We have collected video footage as well as motion data from the robot to be used to solve the classification problem of “Expert vs. Trainee”.
<html>
<center></html>
Figure 1: Hysterectomy procedure, colpotomy step. (Image provided by mentors)
<html>
</center></html>
Background, Specific Aims, and Significance
Background
Majority of previous research utilized virtual reality simulation, and captured data directly from the robot. These papers studied the following surgical tasks:
Suturing
Knot-tying
Needle passing
Cutting
Dissection,
and used features including but not limited to:
Task completion time
Path length
Moving time
Velocity
Idle time
Energy activation
Previous work from our lab focused on the final step of hysterectomy, the vaginal cuff closure.
Aim
Automatically assess skill in robot assisted hysterectomy procedures, particularly the colpotomy step, using video footage from procedures at Johns Hopkins Hospital, as well as motion data from the da Vinci Surgical System.
Significance
“Technological developments are enabling capture and analysis of larger amounts of complex surgical data…[This] allows for the objective computer-aided technical skill evaluation for scalable, accurate assessment; individualized feedback, and automated coaching.” 1) Therefore, the ability to objectively assess the skill level of surgeons is critical for training future surgeons.
Key Terms
Hysterectomy is the process of the removal of the uterus.
Colpotomy is a particular step in the hysterectomy procedure where the connective tissue attaching the uterus to the vaginal opening is removed to release the uterus before removal.
Deliverables
Technical Approach
<html>
<center></html>
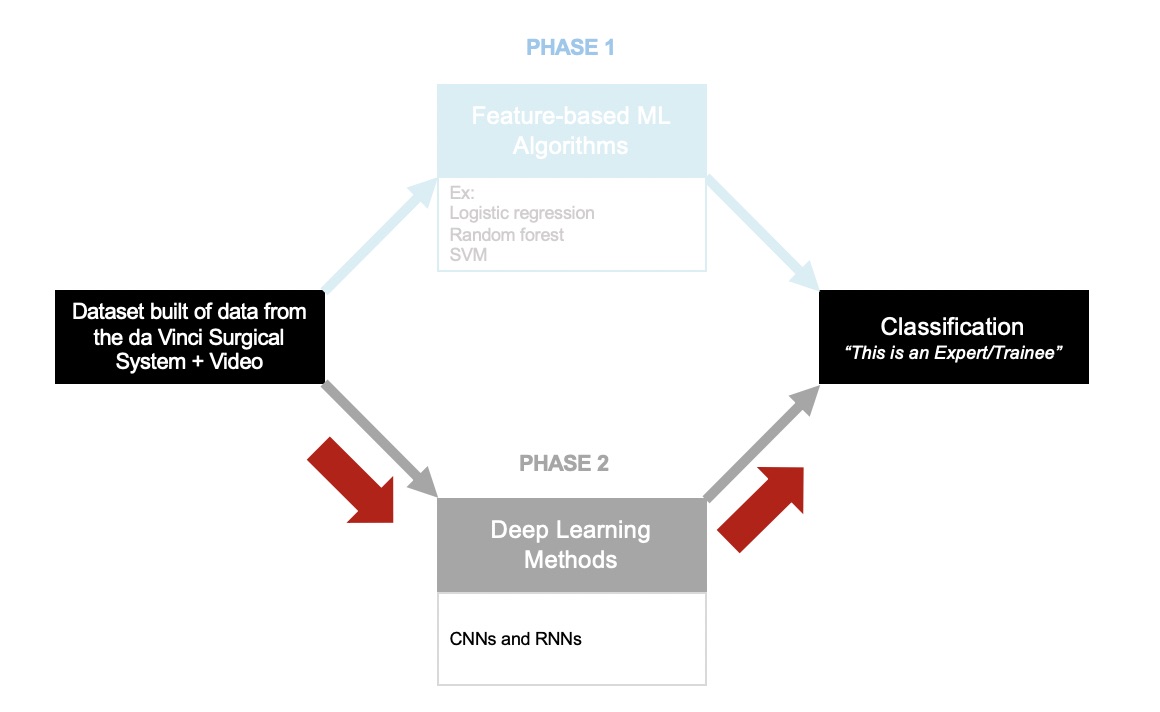
Figure 2: Block diagram of technical plan composing of two phases (Click on image to enlarge)
<html>
</center></html>-
Dependencies
| Dependency | Status | Explanation |
| IRB data access | Resolved | Have completed the proper training modules, have been added to the IRB study |
| Access to the motion data which is under Intuitive NDA | Resolved | Signed the NDA |
| Access to the Johns Hopkins University compute server | Resolved | Given proper credentials by mentors |
| Obtain existing code for neural network methods from graduate student researchers | Resolved | Molly has agreed to sharing her implementation |
Milestones and Status
<html>
<center></html>
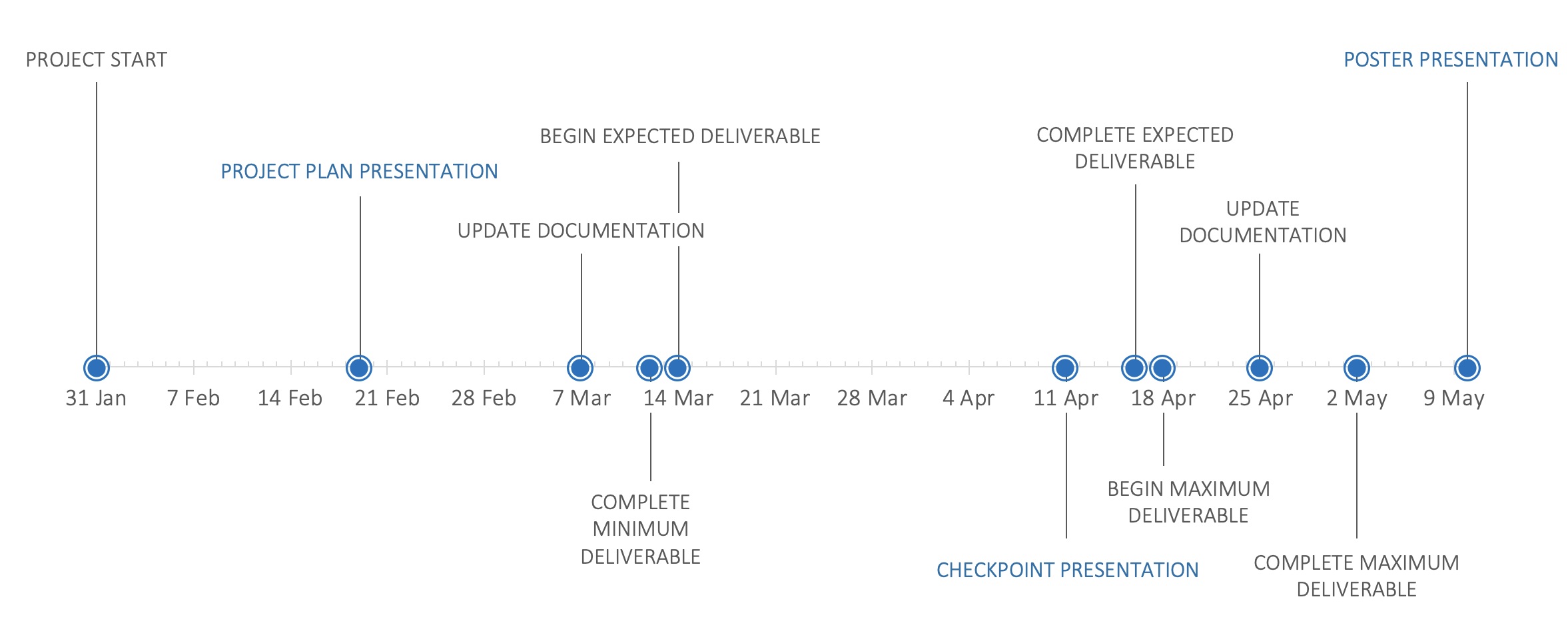
Figure 3: Timeline diagram of milestones (Click on image to enlarge)
<html>
</center></html>-
Milestone name: Project Start
Planned Date: N/A
Expected Date: 31 Jan
Status: Completed
Milestone name: Project Plan Presentation
Planned Date: 14 Feb
Expected Date: 21 Feb
Status: Completed
Milestone name: Update Documentation
Planned Date: 14 Feb
Expected Date: 7 Mar
Status: Completed
Milestone name: Complete Minimum Deliverable
Planned Date: 14 Feb
Expected Date: 28 Mar
Status: Completed
Milestone name: Begin Expected Deliverable
Planned Date: 14 Feb
Expected Date: 30 Mar
Status: Completed
Milestone name: Checkpoint Presentation
Planned Date: 14 Feb
Expected Date: 11 Apr
Status: Completed
Milestone name: Complete Expected Deliverable
Planned Date: 14 Feb
Expected Date: 18 Apr
Status: Completed
Milestone name: Begin Maximum Deliverable
Planned Date: 14 Feb
Expected Date: 20 Apr
Status: Completed
Milestone name: Update Documentation
Planned Date: 14 Feb
Expected Date: 25 Apr
Status: Completed
Milestone name: Complete Maximum Deliverable
Planned Date: 14 Feb
Expected Date: 2 May
Status: Incomplete
Milestone name: Poster Presentation
Planned Date: 31 Jan
Expected Date: 9 May
Status: Completed
Reports and presentations
Project Plan
Project Background Reading
Project Checkpoint
Paper Seminar Presentations
Project Final Presentation
Project Final Report
Project Documentation
-
—-
Project Bibliography
Robotic Surgery Papers Regarding Hysterectomy
Malpani, A & Martinez, N & Vedula, S & Hager, G & Chen, C. (2018). 17: Automated skill classification using time and motion efficiency metrics in vaginal cuff closure. American Journal of Obstetrics and Gynecology. 218. S891-S892.
Papers Regarding Scope of Project
Ershad, Marzieh & Rege, R & Majewicz Fey, A. (2018). Meaningful Assessment of Robotic Surgical Style using the Wisdom of Crowds. International Journal of Computer Assisted Radiology and Surgery. 13. 10.1007/s11548-018-1738-2.
Swaroop Vedula, S & O Malpani, Anand & Tao, Lingling & Chen, George & Gao, Yixin & Poddar, Piyush & Ahmidi, Narges & Paxton, Christopher & Vidal, René & Khudanpur, Sanjeev & Hager, Gregory & Chiung Grace Chen, Chi. (2016). Analysis of the Structure of Surgical Activity for a Suturing and Knot-Tying Task.
Soto, Enrique & Lo, Yungtai & Friedman, Kathryn & Soto, Carlos & Nezhat, Farr & Chuang, Linus & Gretz, Herbert. (2011). Total laparoscopic hysterectomy versus da Vinci robotic hysterectomy: Is using the robot beneficial?. Journal of gynecologic oncology. 22. 253- 9. 10.3802/jgo.2011.22.4.253.
Poddar, Piyush & Ahmidi, Narges & Swaroop Vedula, S & Ishii, Lisa & Hager, Gregory & Ishii, Masaru. (2014). Automated Objective Surgical Skill Assessment in the Operating Room Using Unstructured Tool Motion. International journal of computer assisted radiology and surgery.
Zhang, Yetong & Law, Hei & Kim, Tae-Kyung & Miller, David & Montie, James & Deng, Jia & Ghani, Khurshid & the Michigan Urological Surgery Improvement Collaborative, for. (2018). Surgeon Technical Skill Assessment Using Computer Vision-Based Analysis. The Journal of Urology.
Machine Learning Papers
Malpani, Anand & Swaroop Vedula, S & Chiung Grace Chen, Chi & Hager, Gregory. (2015). A study of crowdsourced segment-level surgical skill assessment using pairwise rankings. International journal of computer assisted radiology and surgery.
Krishnan, Sanjay & Garg, Animesh & Patil, Sachin & Lea, Colin & Hager, Gregory & Abbeel, Pieter & Goldberg, Kenneth. (2017). Transition state clustering: Unsupervised surgical trajectory segmentation for robot learning. The International Journal of Robotics Research.
Other Resources and Project Files
The official documentation can be found above, along with the final report and poster files.



