Contact Us
CiiS Lab
Johns Hopkins University
112 Hackerman Hall
3400 N. Charles Street
Baltimore, MD 21218
Directions
Lab Director
Russell Taylor
127 Hackerman Hall
rht@jhu.edu

Get ready to learn about Gaussian Process's and their application to physical interpolations!
The primary goal of this project is to optimize tissue reconstruction through palpation force measurements. To do this we are employing an online version of gaussian process regression to choose the minimum number of points for an accurate reconstruction. While it has already been employed for AUV optimal trajectories our application could eventually be used for things such as tumor location and identification.
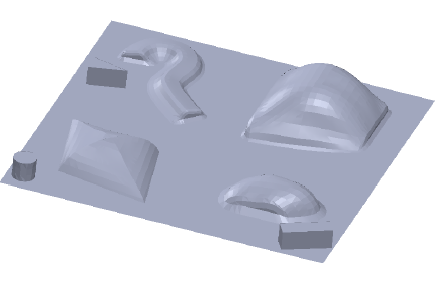
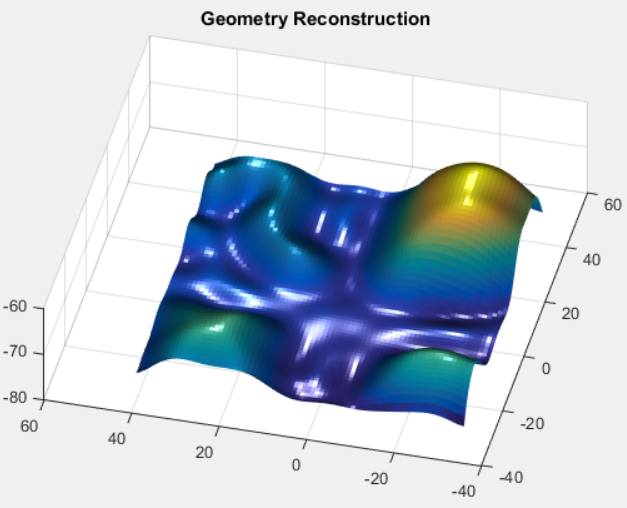
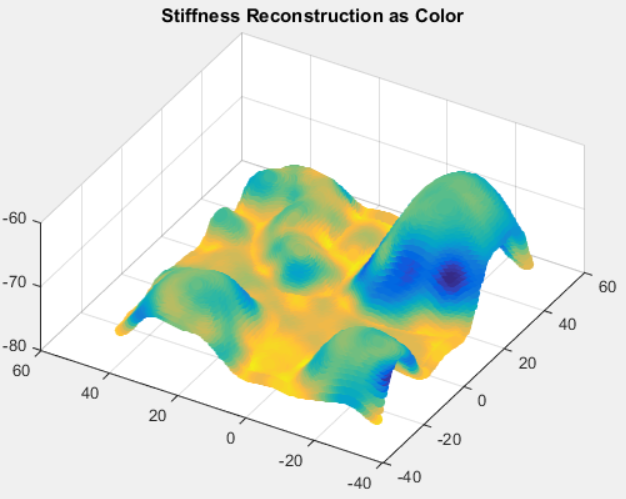
The ultimate goal of this project is to utilize Gaussian Processes to predict geometry of stiffness within a tissue from a finite number of force sensor palpalpation readings. These force sensor palpation readings will act as the training data for the Gaussian Process. The force sensor palpation readings will provide information on height (z), as well as force (f). Using the height information as training data for the geometry Gaussian Process, we created a Gaussian process to predict height from (x,y) position. Using height and force information as a training data for the stiffness Gaussian Process, we created a separate Gaussian process to predict stiffness from (x,y) position.
Gaussian process makes predictions by utilizing the covariances of the points already trained on and covariances of the points you wish to predict at.
The exact formula is as follows: yhat = Cov(trained, predict)*inv(Cov(trained, trained))*trained.
The beauty of this is that a ground truth is not necessary for comparing against nor is an exact function needed to fit. The gaussian process also predicts the variance in the prediction at each point. We utilize this in the training process to choose the optimal trajectory of the robot. When each point is added to the training set a set of random nearby points is generated as the potential next point and the change in the variance based on the predicted knowledge gain should one of these be added to the model. The point which adds the most information is then chosen.
At this point, almost all of our dependencies have been met.
We currently rely on only:
- Access to more phantoms for testing and validation, particularly for the stiffness reconstruction.
- Access to mentors for advise/guidance
1. C. E. Rasmussen & C. K. I. Williams, Gaussian Processes for Machine Learning, the MIT Press, 2006, ISBN 026218253X. c 2006 Massachusetts Institute of Technology.
2. Ebden, Mark. Gaussian Process for Regression: A Quick Introduction. N.p., Aug. 2008. Web. Neal, R.M.: Regression and classification using Gaussian process priors (with discussion). In Bernardo, J.M., et al., eds.: Bayesian statistics 6. Oxford University Press (1998) 475–501
3. Williams, C.K.I.: Prediction with Gaussian processes: From linear regression to linear prediction and beyond. In Jordan, M.I., ed.: Learning in Graphical Models. Kluwer Academic (1998) 599–621
4. Kroese, D. “The Cross-Entropy Method.” A Unified Approach to Combinatorial Optimtimization, Monte-Carlo Simulation and Machine Learning. By R. Rubinstein. N.p.: n.p., n.d. N. pag. Print.
All associated codes are in the Reports and Presentations section. Under Project Final Report
This work was supported in part by NRI grant IIS-1327566, in part by NSF NRI 1208540, and in part by Johns Hopkins University internal funds