HMD-Based Navigation for Ventriculostomy
Last updated: 05/08 10:56 AM
Summary
This project is aimed to introduce image guidance via augmented reality on HoloLens.
Students: Yiwei Jiang, Mingyi Zheng
Mentors: Peter Kazanzides, Ehsan Azimi
Background, Specific Aims, and Significance
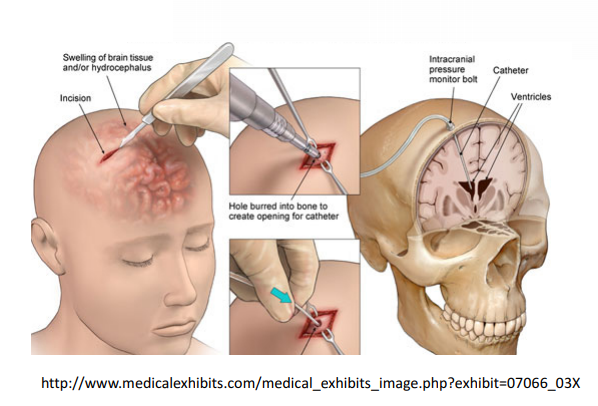
A ventriculostomy is a device that drains excess cerebrospinal fluid from the head. It is
also used to measure the pressure in the head (referred to as ICP, intracranial pressure).
The system is made up of a small tube, drainage bag, and monitor. Here is a brief surgical
procedure for ventriculostomy refer to Figure 1 below:
1. Incision
2. Hole burred into bone to create opening for catheter
3. Insert catheter and drain excess fluid from ventricle
Deliverables
Technical Approach
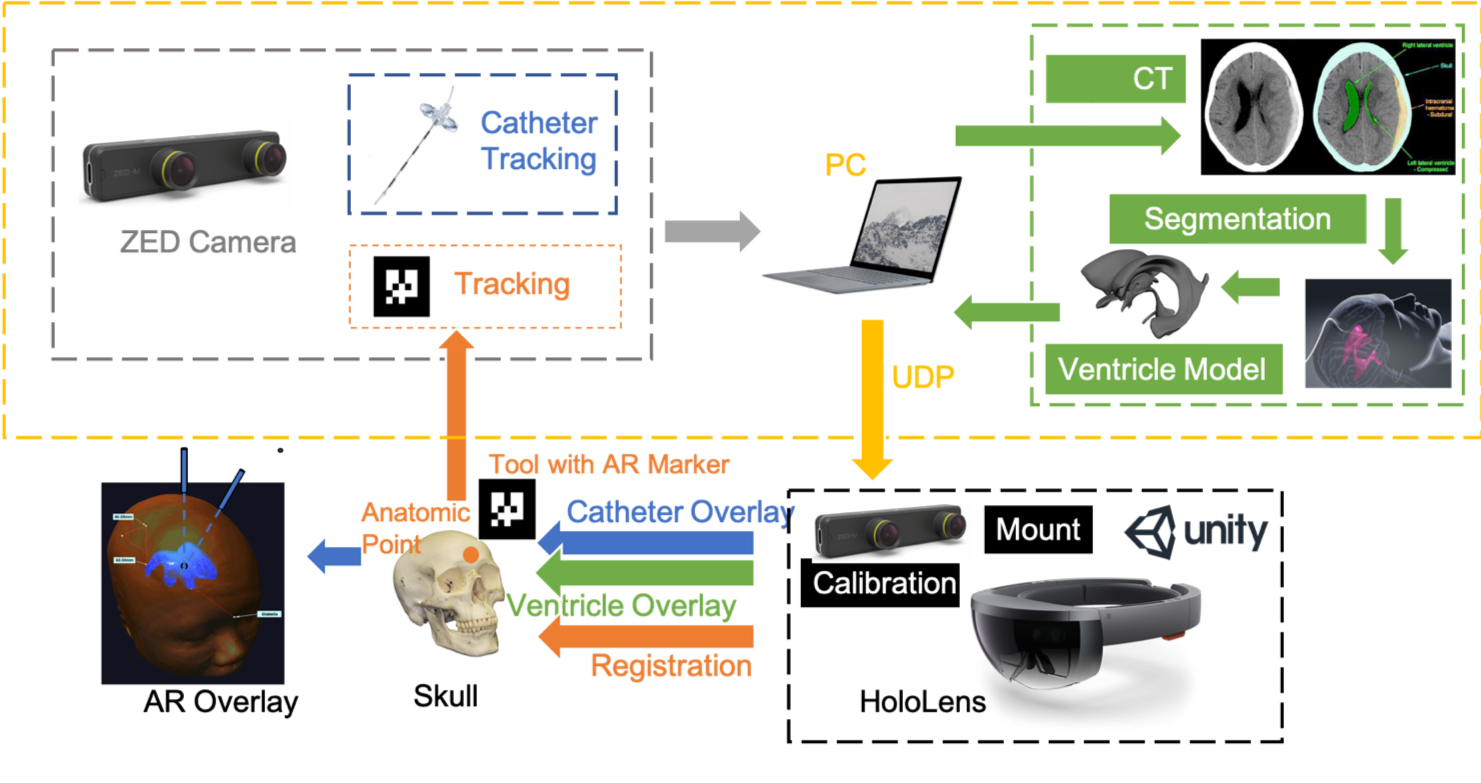
Our navigation system work flow diagram is shown as Fig. 3, and the following steps
describe the workflow in detail.
a. A ZED mini camera mounted to HoloLens to track skull(AR marker) and catheter
b. Register CT to patient by touching anatomic points (glabella)
c. Create ventricle model by segmenting CT on PC and import model to Unity
d. Unity generate AR overlay of ventricle and overlay via HoloLens
i. Target accuracy within 3 mm
e. Unity generates entry point by touching and overlay via HoloLens
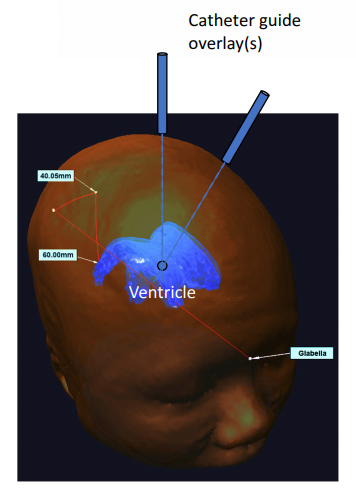
f. Display Catheter guide line on HoloLens, which a virtual line from centroid of
ventricle to entry point with possibility for entry point adjustment
g. Catheter tracking result including catheter insertion depth, angle that processed on
PC and send to Unity through UDP
h. Unity receives catheter tracking result from PC and overlay the information via
HoloLens
CAD Design
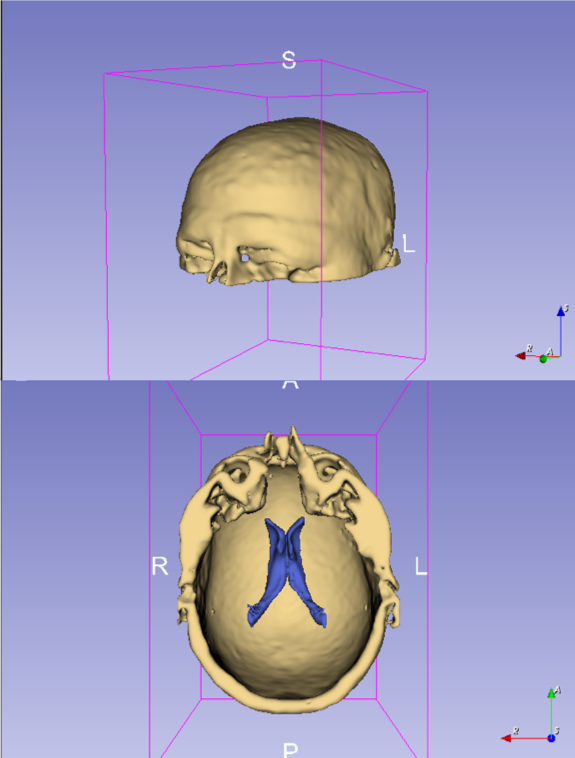
Ventricle Segmentation
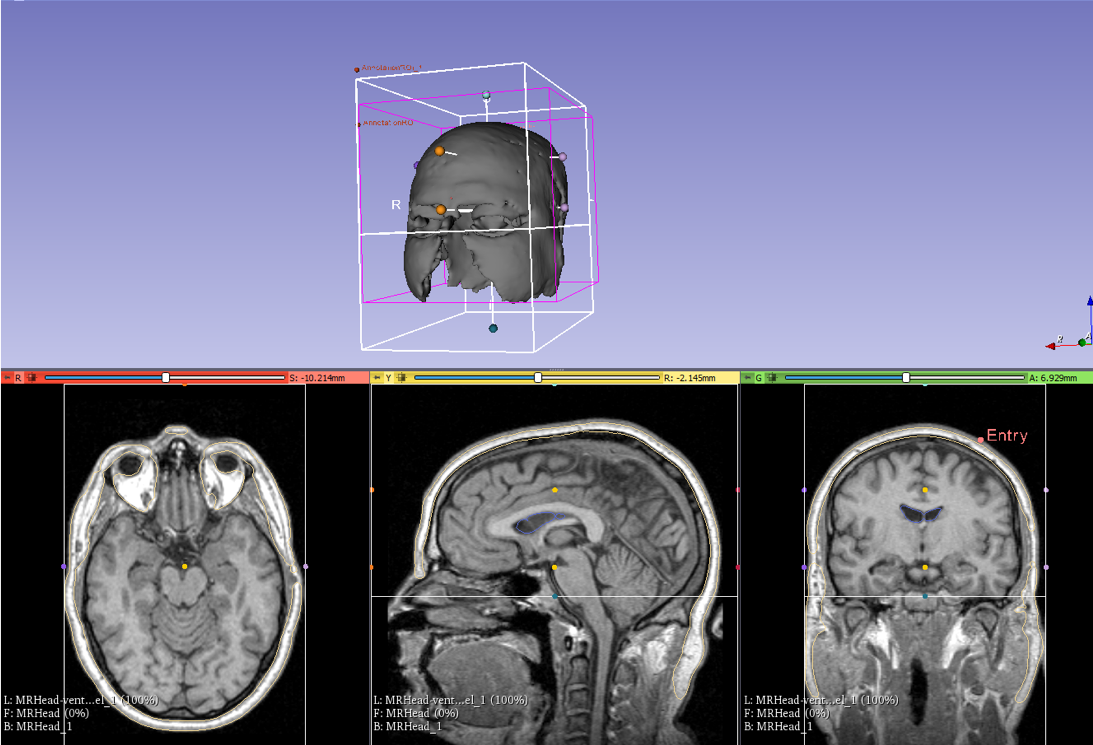
- Ventricle and Skull segmentation in 3D slicer
Thresholding
Select target object
Close holes
Smooth and mesh
- Manually select anatomic point and entry point to get relative position
Test
- 3D print top half part of segmented head
- Print 2 parts, skull and ventricle
- Skull
- Ventricle
- Test
Workflow
Software Design
Software Design
Registration
Catheter Tracking
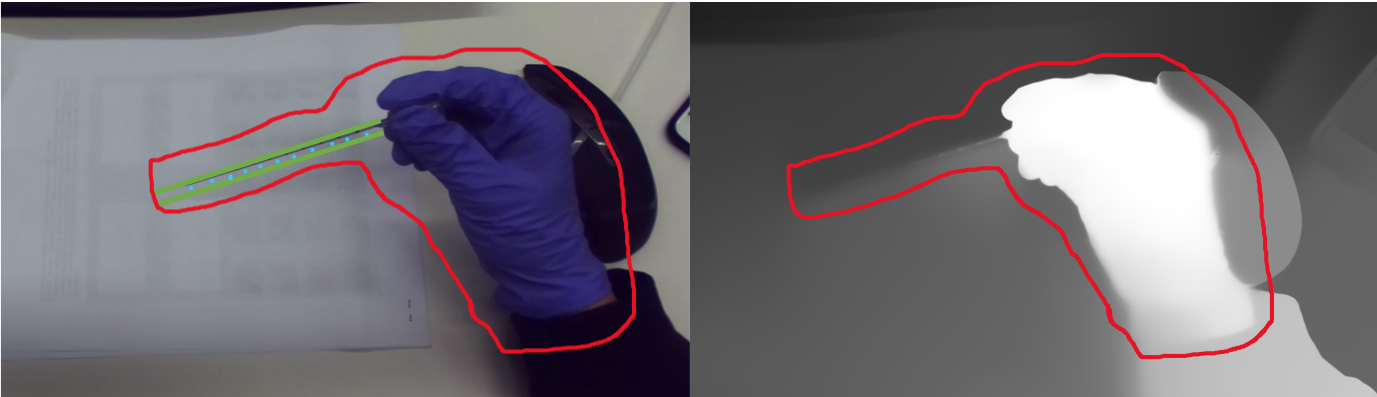
1. RGB image to locate hand position as seed points with purple gloves
2. Mask the region around seed point with similar depth
3. Hough Transformation to find the catheter
4. Thresholding to get tip and scale lines
5. Calculate tip position and angle of catheter
Overlay
Without MRI Mode
Overlay a 5cm sphere on the origin of the constructed frame;
Cast a ray from the origin, At a 45 degree angle to the x’o’y’ plane.
With MRI Mode
Overlay a 3D ventricle model on T_ventricleCenter_anatomical(x,y,z,R,P,Y) obtained from MRI;
Also overlay a 3cm sphere on P_entry_anatomical(x,y,z);
Cast a line from the center of ventricle to entry.
Dependencies
Schedule
Milestones and Status
Segmentation and 3D reconstruction of Skull and Ventricle
Planned Date: 3/5
Expected Date: 3/5
Status: Completed
Navigation System Without-MRI Mode
Planned Date: 4/2
Expected Date: 4/5
Status: Completed
Navigation System With-MRI Mode
Planned Date: 4/9
Expected Date: 4/10
Status: Completed
ZED Camera Calibration
Planned Date: 4/10
Expected Date: 4/13
Status: Completed
Catheter Tracking
Planned Date: 4/30
Expected Date: 5/3
Status: In progress
Evaluation of Performance with Skull Phantom
Planned Date: 5/6
Expected Date: 5/6
Status: In progress
Final Report and Poster
Planned Date: 5/8
Expected Date: 5/8
Status: In progress
Reports and presentations
Project Plan
Project Background Reading
Project Checkpoint
Paper Seminar Presentations
Project Teaser
Project Final Presentation
Project Final Report
Project Bibliography
Azimi, E., Doswell, J., Kazanzides, P.: Augmented reality goggles with an inte- grated tracking system for navigation in neurosurgery. In: Virtual Reality Short Papers and Posters (VRW), pp. 123–124. IEEE (2012)
Azimi, E., et al.: Can mixed-reality improve the training of medical procedures? In: IEEE Engineering in Medicine and Biology Conference (EMBC), pp. 112–116, July 2018
Sadda, P., Azimi, E., Jallo, G., Doswell, J., Kazanzides, P.: Surgical navigation with a head-mounted tracking system and display. Stud. Health Technol. Inform. 184, 363–369 (2012)
Chen, L., Day, T., Tang, W., John, N.W.: Recent developments and future chal- lenges in medical mixed reality. In: IEEE International Symposium on Mixed and Augmented Reality (ISMAR), pp. 123–135 (2017)
Qian, L., Azimi, E., Kazanzides, P., Navab, N.: Comprehensive tracker based dis- play calibration for holographic optical see-through head-mounted display. arXiv preprint arXiv:1703.05834 (2017)
Saucer, F., Khamene, A., Bascle, B., Rubino, G.J.: A head-mounted display system for augmented reality image guidance: towards clinical evaluation for imri-guided nuerosurgery. In: Niessen, W.J., Viergever, M.A. (eds.) MICCAI 2001. LNCS, vol. 2208, pp. 707–716. Springer, Heidelberg (2001).
Azimi, Ehsan, et al.: Interactive Training and Operation Ecosystem for Surgical Tasks in Mixed Reality. OR 2.0 Context-Aware Operating Theaters, Computer Assisted Robotic Endoscopy, Clinical Image-Based Procedures, and Skin Image Analysis. Springer, Cham, 20-29.(2018).
External Link
Other Resources and Project Files













